Thing Ethnography in a Factory: Exploring Emergent and Dynamic Relations of Cobots and Workers (CHI 2026)
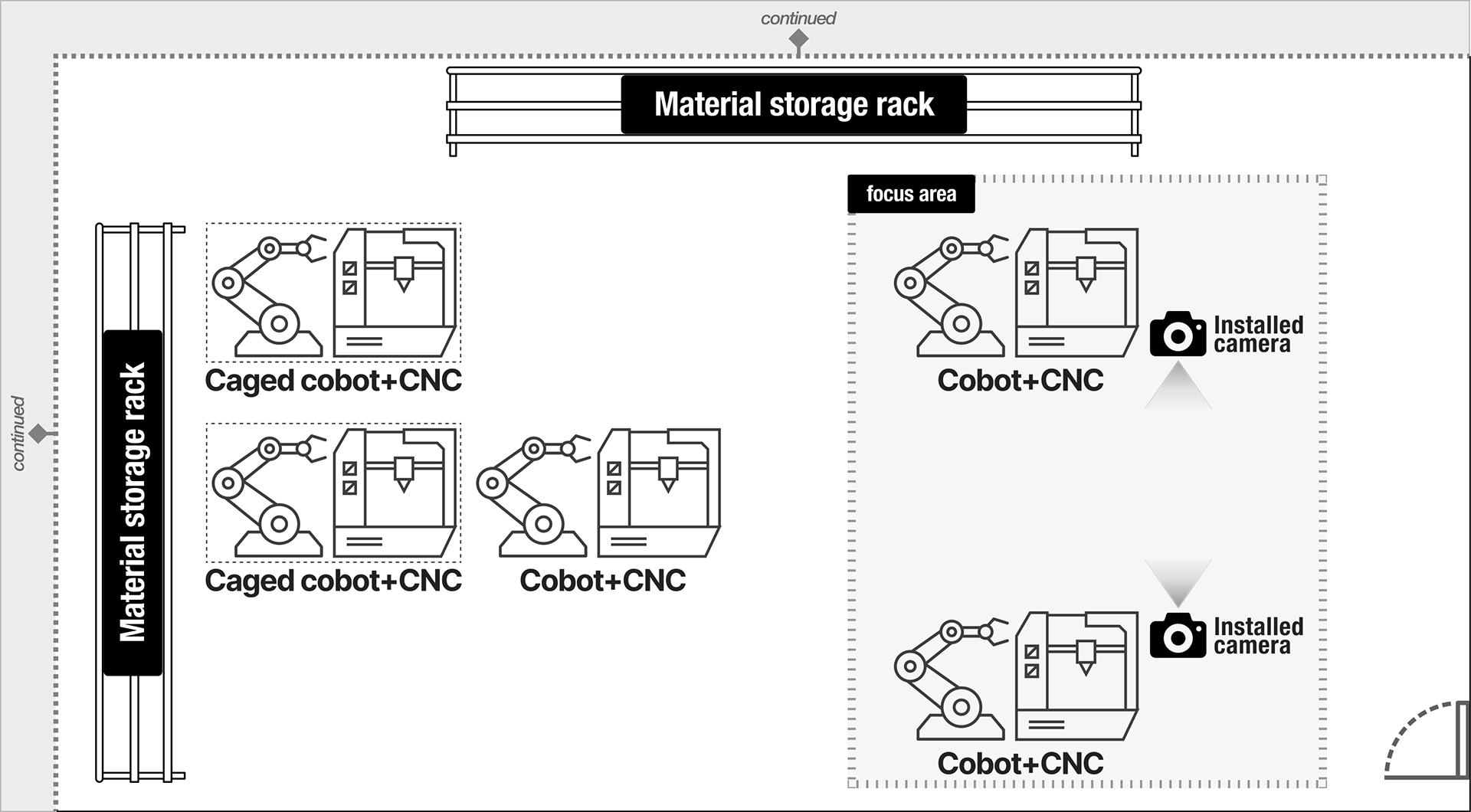
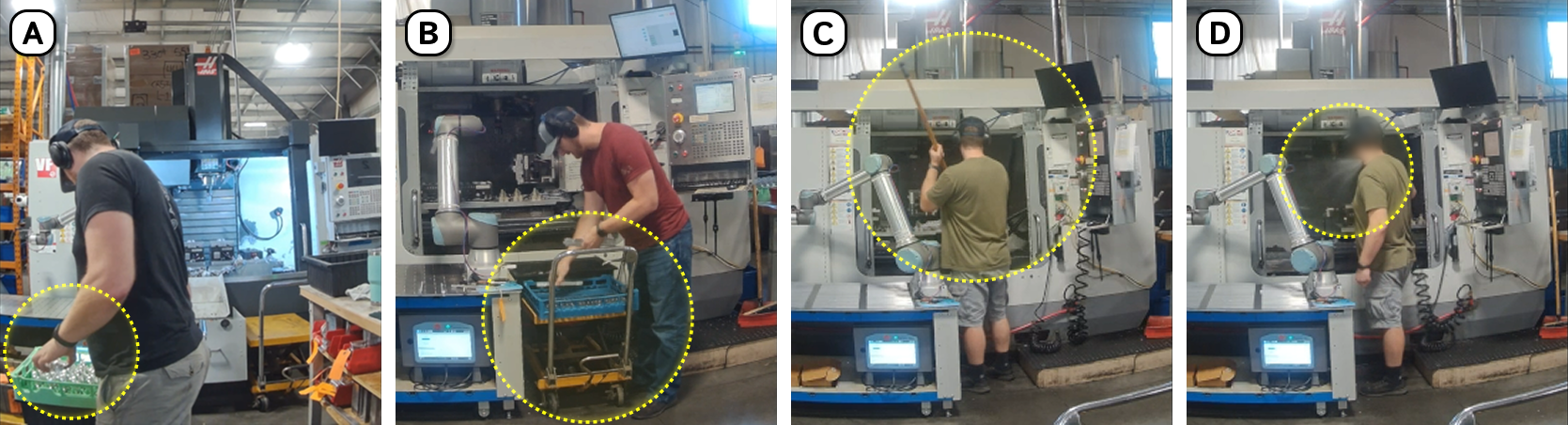
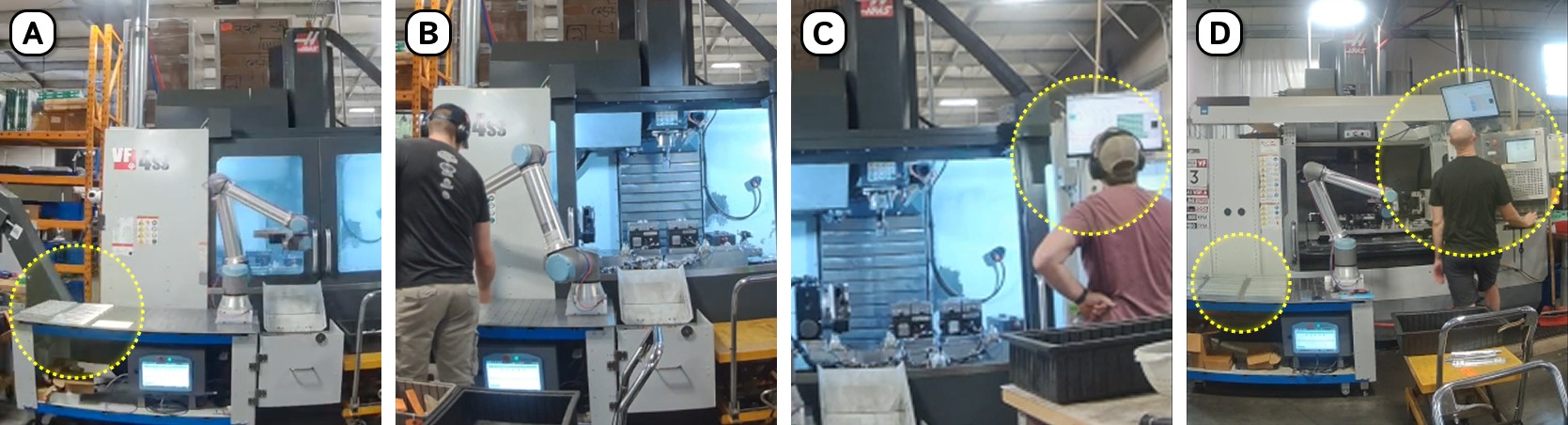
Collaborating with Hyungjun Cho, Yongjae Sohn, and Heerin Lee, we challenge common portrayals of collaborative robots (cobots) as fully autonomous collaborators in industrial workplaces. Drawing on an 18-day robot-centered thing ethnography in a small-scale factory, we found that cobot roles were not fixed but dynamically shaped through intra-actions with CNC machines, workers, and the factory owner. Our analysis revealed three roles: (1) frontline operators performing repetitive tasks, (2) care receivers requiring constant maintenance, and (3) managerial deflectors causing stoppages that demanded human intervention. Although cobots seemed central to production, they depended heavily on invisible human labor such as scheduling, maintenance, and communication. We argue that advancing cobot design requires moving beyond assumptions of autonomy and collaboration, recognizing them as entities whose roles are continuously redefined by their environments and relations.
My responsibility: Data collection, analysis, and writing
#human-robot collaboration #cobot #intra-action #invisible labor #automation #thing ethnography